Zestaw budowy drona X500 v2
Zestaw budowy drona X500 v2
Nie udało się załadować dostępności odbioru osobistego
Zestaw budowy drona PX4 - X500 v2
Zestaw budowy drona PX4 - X500 v2 to przystępny, lekki i wytrzymały zestaw do rozwoju profesjonalnych dronów z włókna węglowego, wyposażony w najnowszy autopilot Holybro Pixhawk 6C lub Pixhawk 6X, moduł GPS M8N oraz telemetrię SiK typu plug & play. Zestaw jest szybki i łatwy do złożenia (około 30 minut) bez potrzeby lutowania, dzięki czemu zyskujesz więcej czasu na latanie i rozwój. Zawiera ramę X500 V2, silniki, ESC, płyty dystrybucji mocy oraz dodatkowe śmigła. Ramiona drona są fabrycznie wyposażone w silniki i ESC, które można łatwo podłączyć do płyty dystrybucji mocy bez konieczności lutowania.
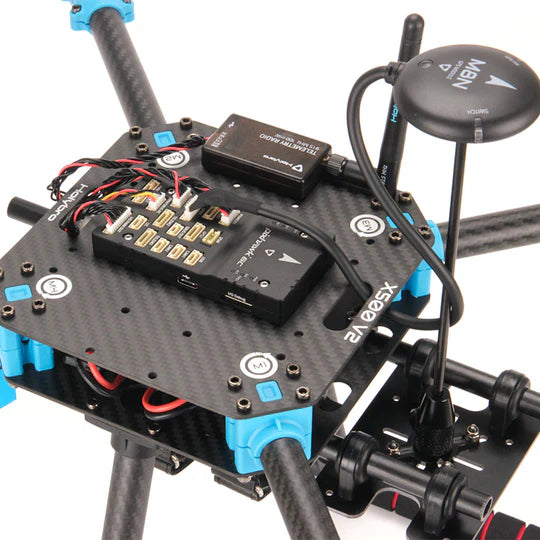
Rama (X500 v2) wykonana jest z pełnego włókna węglowego, z ramionami z rur włókna węglowego, wspartymi nowo zaprojektowanymi nylonowymi łącznikami wzmocnionymi włóknem, posiadającymi wygodne wycięcia po obu stronach silników i korpusu, co ułatwia instalację. Podwozie składa się z rur z włókna węglowego o średnicy 16 mm i 10 mm, z łącznikami, które zostały wzmocnione i pogrubione.
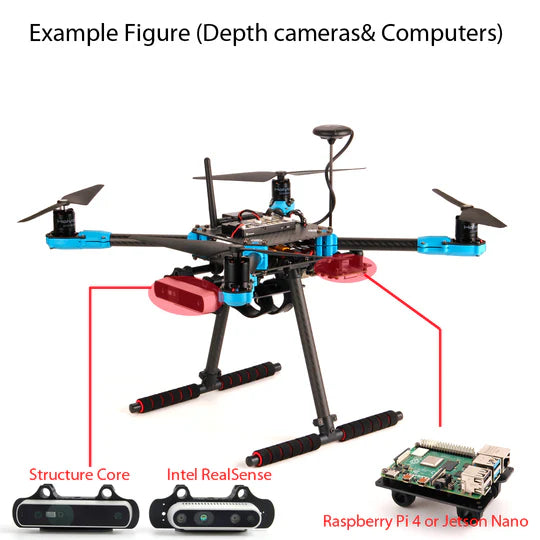
Płyta platformy teraz posiada otwory montażowe dla GPS oraz popularnych komputerów towarzyszących, takich jak Raspberry Pi 4 i Jetson Nano. Istnieje opcjonalny uchwyt na kamerę głębokości (dostępny osobno) do różnych kamer głębokości, takich jak seria Intel RealSense oraz kamery Structure Core. Odległość między górną a dolną płytą włókna węglowego została zwiększona, aby ułatwić dostęp. Regulowana płyta montażowa akumulatora została powiększona, aby obsługiwać większe akumulatory, co zapewnia dłuższy czas lotu. System montażu szynowego jest gotowy na zamontowanie szerokiej gamy uchwytów kamerowych i gimbali do różnych zastosowań. Wszystkie narzędzia potrzebne do instalacji są dołączone do zestawu.
Uwaga: Kontroler lotu Pixhawk 6C jest kompatybilny zarówno z PX4, jak i Ardupilot, ale wysyłany jest z wgranym oprogramowaniem autopilota PX4 open-source.
Funkcje:
- Nowy kontroler lotu Pixhawk 6C lub Pixhawk 6X z modułem GPS M10 i telemetrią SiK typu plug & play
- Nowa konstrukcja ramy z minimalnym czasem montażu (~30 minut), bez potrzeby lutowania
- Rama z włókna węglowego z nylonowymi łącznikami wzmocnionymi włóknem, co zapewnia łatwą i prostą instalację
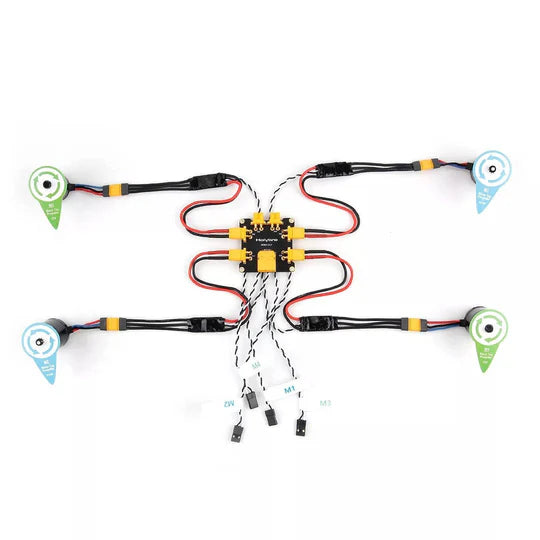
- Silniki i ESC fabrycznie zainstalowane z prostymi wtykami XT30 do płyty dystrybucji mocy (PDB)
- Płyta dystrybucji mocy (PDB) z wtykami XT60 i XT30
- Uchwyt do komputerów towarzyszących, takich jak Raspberry Pi i Nvidia Jetson Nano
- Opcjonalny uchwyt do kamer głębokości dla Intel RealSense i Structure Core
Uwaga:
- Wersja Pixhawk 6X teraz wysyłana jest z wersją PM02D-HV (wysokie napięcie). W PX4 należy ustawić SENS_EN_INA228, aby to włączyć. Ta wersja HV jest obsługiwana tylko w Ardupilot 4.4 i nowszych. Przewodnik po konfiguracji dostępny tutaj.
- Obsługa oprogramowania dla GPS M10: Wymagana jest wersja PX4 1.14 i ArduPilot 4.3 lub nowsza.
Zawartość Zestawu budowy drona PX4 - X500 v2:
- Kontroler lotu autopilota: Pixhawk 6C (plastikowa obudowa) i PM02 V3 lub Pixhawk 6X (v2A płyta główna) i PM02D
- Moduł GPS M10
- Telemetria SiK Radio V3 433/915MHz
- Rama X500 V2 Kit (SKU30120)
Elementy fabrycznie zainstalowane:
- Silniki – Holybro 2216 KV920 (4 szt.) z wtykami XT30 (specyfikacja silnika dostępna tutaj)
- ESC – BLHeli S ESC 20A (4 szt.) z wtykami XT30 – kompatybilne z akumulatorem 4S
- Śmigła 1045 (6 szt.)
- Płyta dystrybucji mocy (wtyk XT60 do akumulatora i wtyk XT30 do ESC i akcesoriów)
Inne opcjonalne elementy (sprzedawane oddzielnie):
- RadioMaster TX16S RC Controller
- RadioMaster R81 Receiver
- Uchwyt na kamerę głębokości
Szczegóły ramy X500 V2 (SKU30120):
- Korpus – pełna płyta z włókna węglowego (144 x 144 mm, grubość 2 mm)
- Ramię – rurki z włókna węglowego o wysokiej wytrzymałości i ultralekkie, z nowymi łącznikami nylonowymi wzmocnionymi włóknem
- Podwozie – rurki z włókna węglowego o średnicy 16 mm i 10 mm z wzmocnionymi łącznikami z plastiku
- Płyta platformy – z otworami montażowymi dla GPS i popularnych komputerów towarzyszących, takich jak Raspberry Pi 4 i Jetson Nano
- System montażu szynowego – podwójna 10 mm średnica pręta x 250 mm długości
- Mocowanie akumulatora z dwoma pasami do akumulatora
- Narzędzia ręczne do instalacji
Specyfikacja mechaniczna:
- Rozstaw kół: 500 mm
- Wzór montażu silnika: 16x16 mm i 19x19 mm
- Korpus ramy: 144 x 144 mm, grubość 2 mm
- Wysokość podwozia: 215 mm
- Odległość między górną a dolną płytą: 28 mm
- Waga: 610 g
- Czas lotu: ~18 minut zawis (bez dodatkowego ładunku). Testowane z akumulatorem 5000 mAh.
- Ładowność: 1500 g (bez akumulatora, 70% gazu)
- Rekomendacja akumulatora: 4S 3000-5000 mAh 20C+ z akumulatorem Lipo XT60 (nie dołączony)
Share