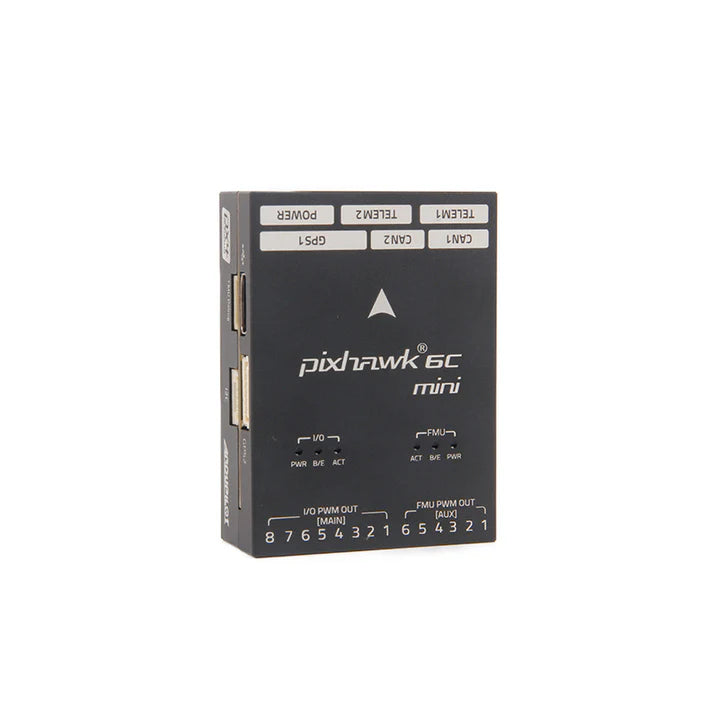
Pixhawk 6C Mini
Pixhawk 6C Mini
Nie udało się załadować dostępności odbioru osobistego
Wysyłka z Polski
Pixhawk® 6C Mini to najnowsza aktualizacja popularnej rodziny kontrolerów lotu Pixhawk®, oparta na otwartym standardzie Pixhawk® FMUv6C oraz standardzie złączy. Urządzenie wykorzystuje ten sam mikroprocesor STM32H743 i te same czujniki co Pixhawk® 6C. W porównaniu do standardowej wersji Pixhawk® 6C, wersja Mini została wyposażona w zintegrowane złącze PWM, a niektóre porty zostały usunięte, aby dostosować urządzenie do mniejszego formatu.
Wewnątrz Pixhawk® 6C Mini znajduje się mikroprocesor STM32H743 firmy STMicroelectronics®, współpracujący z technologią czujników od Bosch® i InvenSense®. Zapewnia on elastyczność i niezawodność w sterowaniu pojazdami autonomicznymi, zarówno w zastosowaniach akademickich, jak i komercyjnych.
Mikrokontroler H7 w Pixhawk® 6C Mini wykorzystuje rdzeń Arm® Cortex®-M7 o taktowaniu do 480 MHz, oferując 2 MB pamięci flash oraz 1 MB pamięci RAM. Dzięki zwiększonej mocy obliczeniowej programiści mogą pracować wydajniej, implementując bardziej złożone algorytmy i modele.
Standard FMUv6C obejmuje wysokowydajne i niskoszumowe IMU, zaprojektowane w sposób ekonomiczny, ale zapewniające redundancję czujników. System izolacji drgań filtruje wibracje o wysokiej częstotliwości i redukuje szumy, co umożliwia precyzyjne odczyty i poprawia ogólną wydajność lotu.
Pixhawk® 6C Mini to idealne rozwiązanie dla programistów w laboratoriach badawczych, startupów, środowisk akademickich (badania, wykładowcy, studenci) oraz zastosowań komercyjnych.
Kluczowe cechy
✔ Wysokowydajny procesor STM32H743 z większą mocą obliczeniową i pamięcią RAM
✔ Nowa, kompaktowa i ekonomiczna konstrukcja
✔ Redundancja IMU dzięki technologii czujników Bosch® i InvenSense®
✔ Zintegrowany system izolacji drgań dla dokładniejszych pomiarów
✔ IMU z kontrolą temperatury dzięki wbudowanym rezystorom grzewczym, zapewniającym optymalne warunki pracy
✔ Możliwość przełączania sygnału PWM na 3.3V lub 5V (wymaga otwarcia obudowy)
Specyfikacja
Procesory i czujniki
Procesor FMU: STM32H743
-
32-bitowy Arm® Cortex®-M7, 480 MHz
-
2 MB pamięci flash, 1 MB pamięci RAM
Procesor I/O: STM32F103
-
32-bitowy Arm® Cortex®-M3, 72 MHz
-
64 KB SRAM
Czujniki na pokładzie:
-
Akcelerometr/żyroskop: ICM-42688-P
-
Akcelerometr/żyroskop: BMI055
-
Magnetometr: IST8310
-
Barometr: MS5611
Dane elektryczne
Zakres napięć:
-
Maksymalne napięcie wejściowe: 6V
-
Zasilanie przez USB: 4,75–5,25V
-
Zasilanie szyny serw: 0–36V
Maksymalne natężenie prądu:
-
Telem1 i GPS2 (łączny limit): 1,5A
-
Pozostałe porty (łączny limit): 1,5A
Temperatura pracy: -40°C ~ 85°C
Dane mechaniczne
| Model | Wymiary | Waga |
|---|---|---|
| Model A | 53.3 × 39 × 16.2 mm | 39.2 g |
| Model B | 58.3 × 39 × 18.15 mm | 46.8 g |
Dodatkowe informacje
Wymagania systemowe:
-
GPS M10 wymaga PX4 1.14 lub ArduPilot 4.3 (lub nowszego).
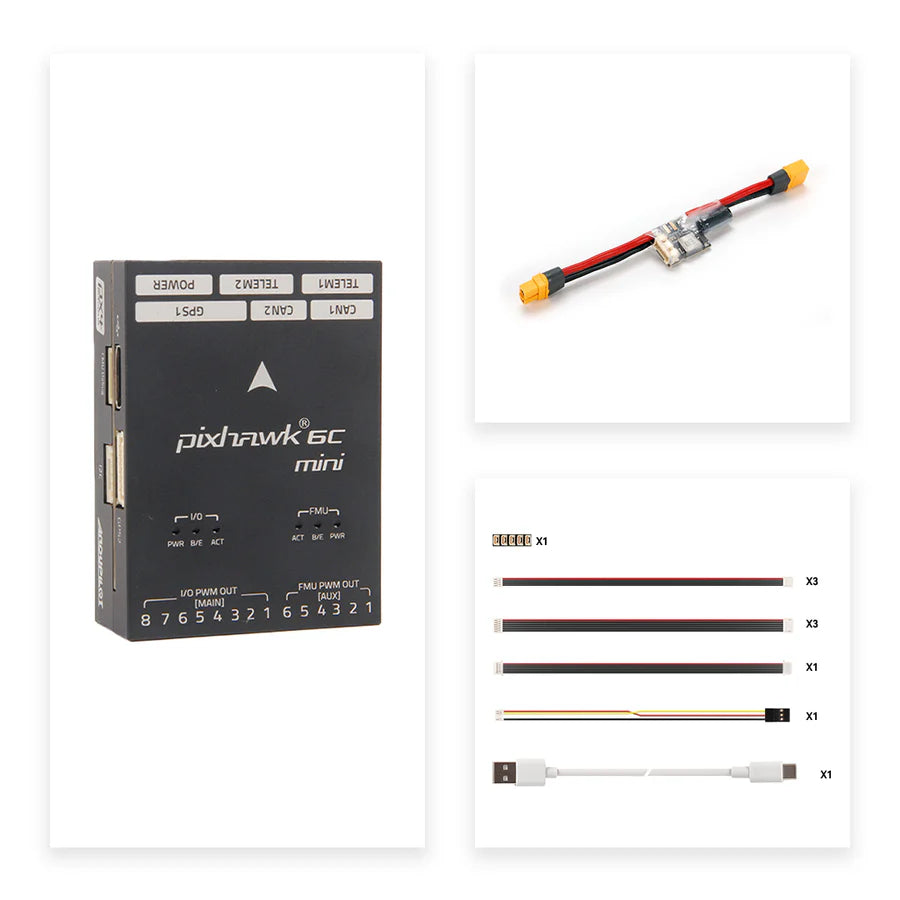
Zawartość zestawów:
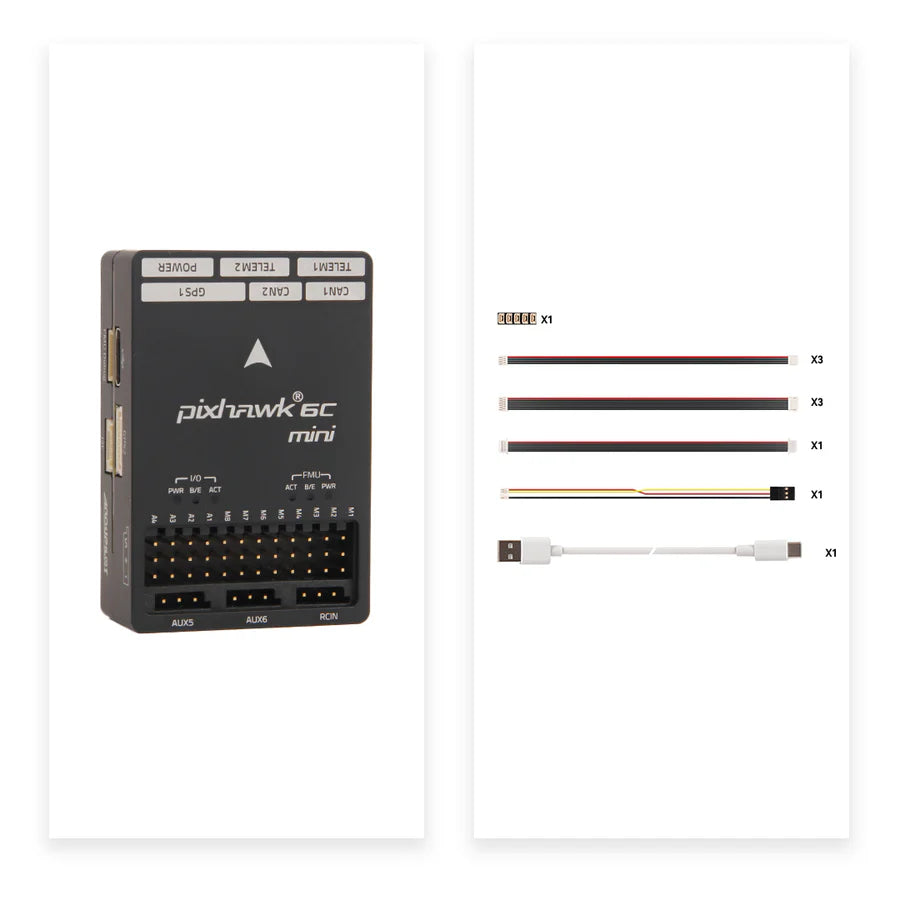
SKU11062 / 11079 zawiera:
-
Pixhawk 6C Mini (Model A / Model B)
-
Zestaw kabli
SKU20199 / 20201 / 20325 / 20328 zawiera:
-
Pixhawk 6C Mini (Model A / Model B)
-
Moduł zasilania PM02 V3 (12S) lub PM06 (14S)
-
Zestaw kabli
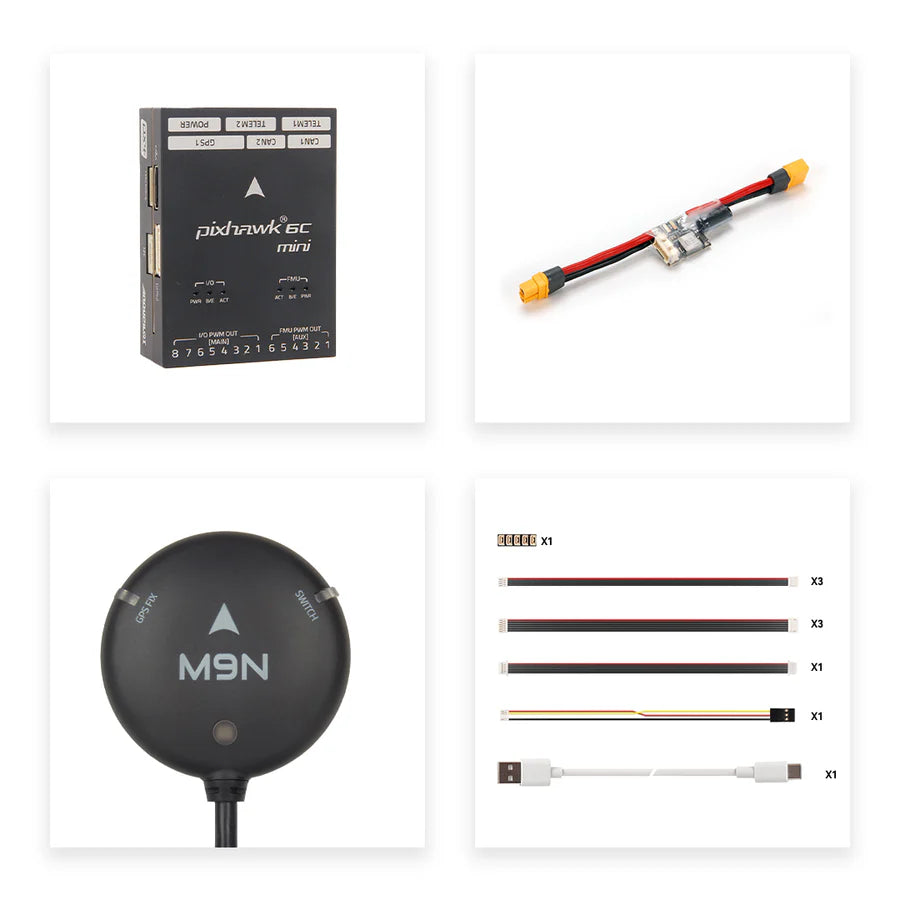
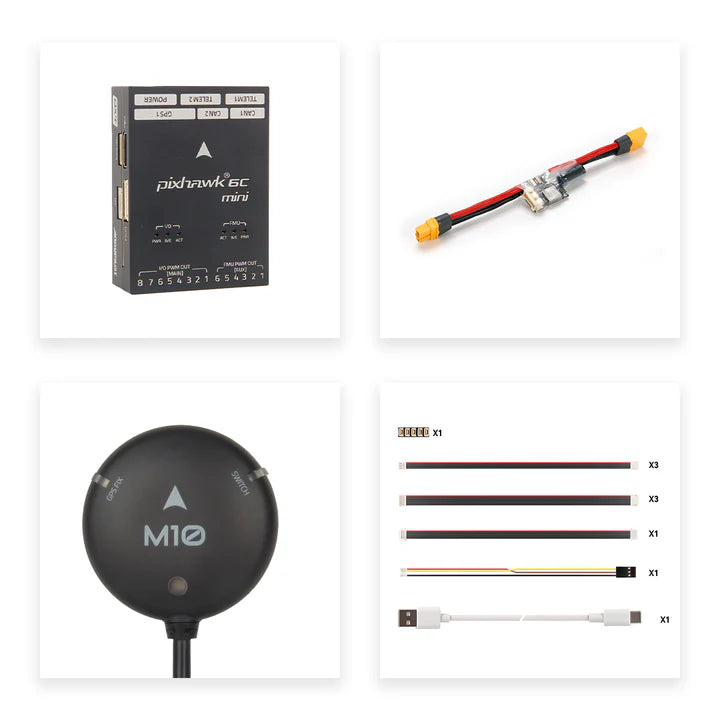
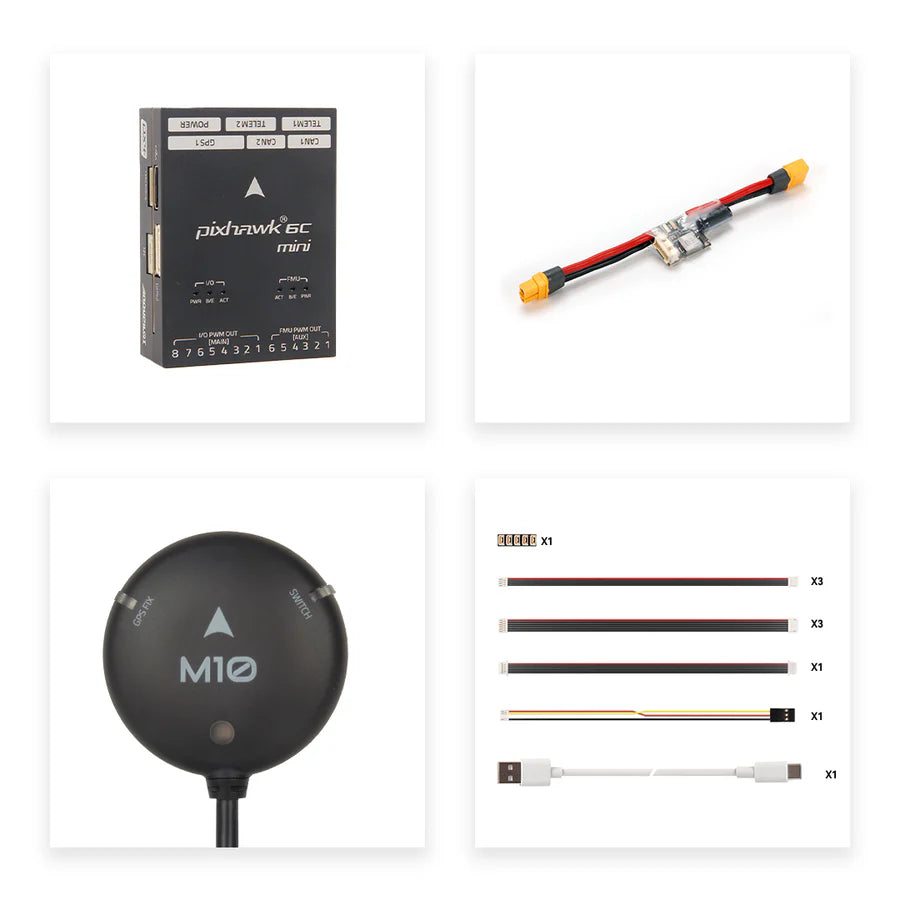
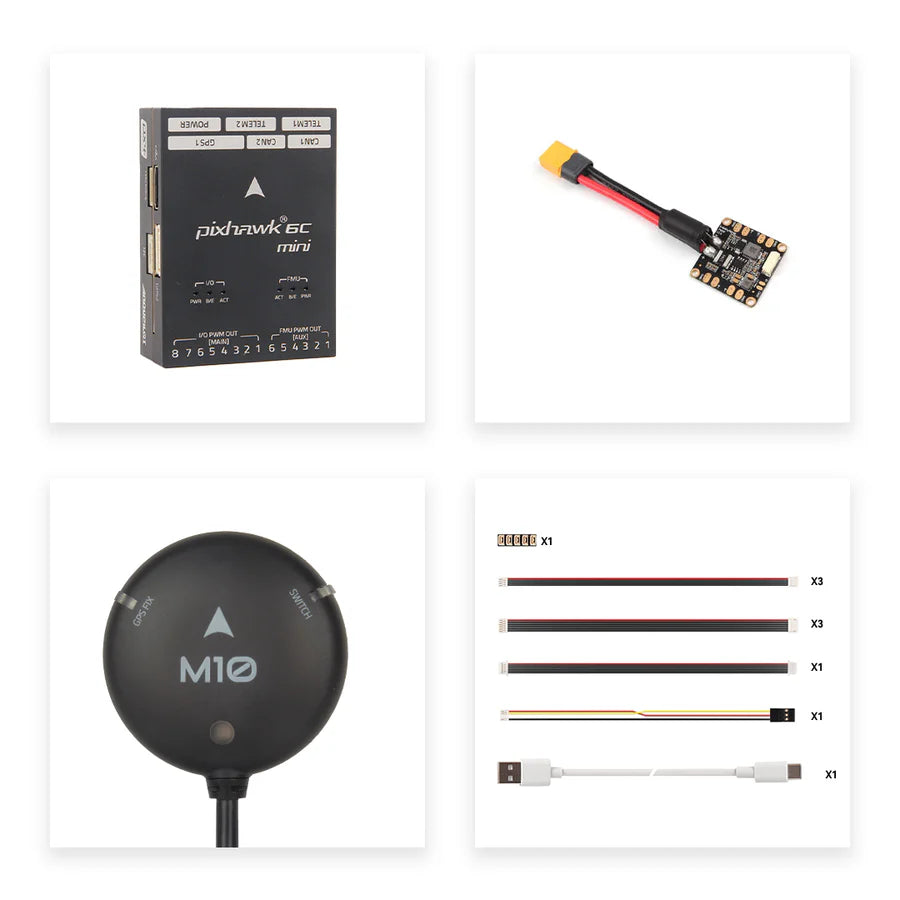
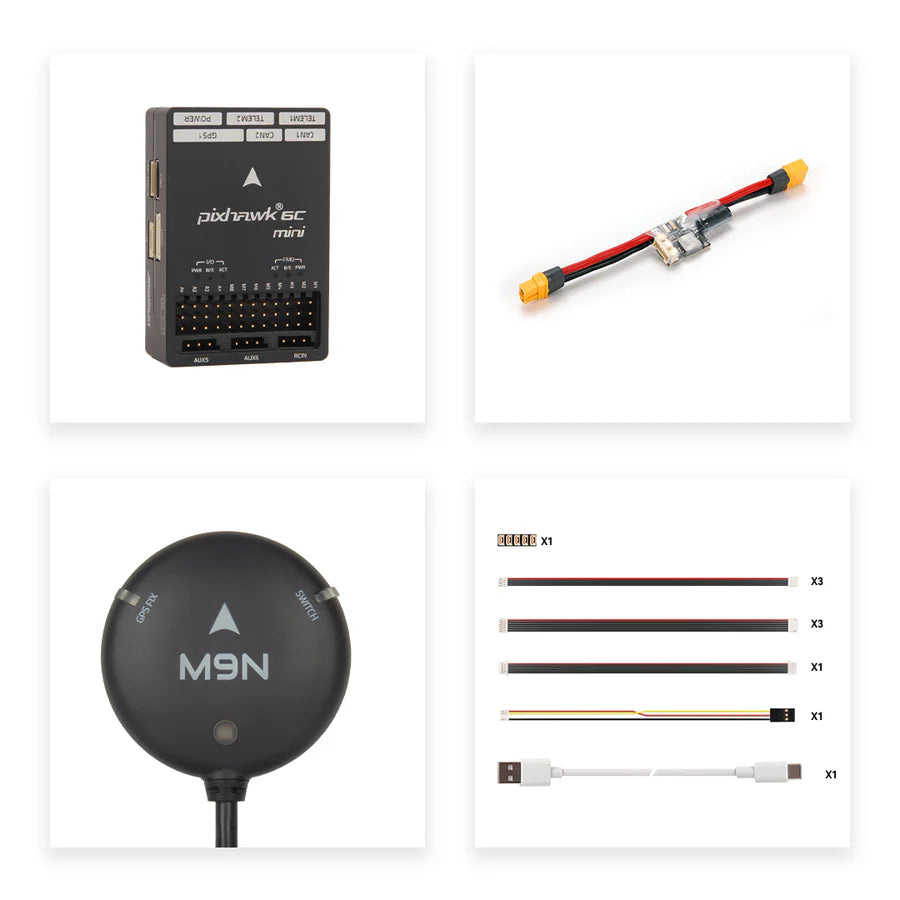
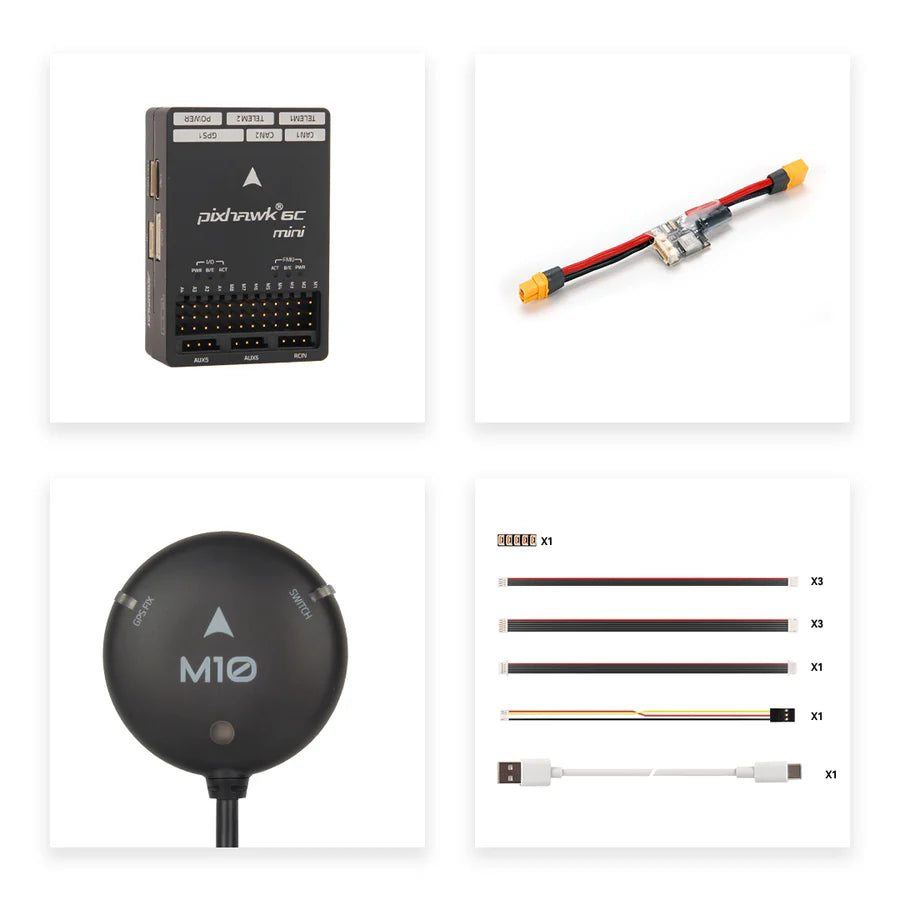
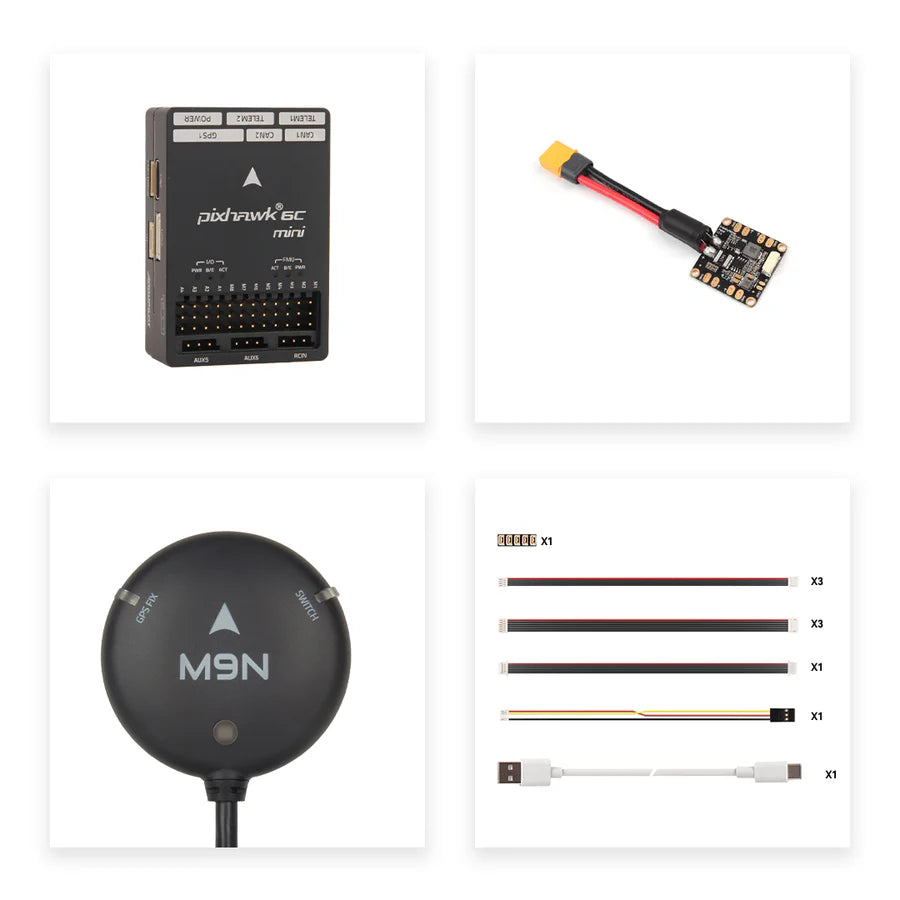
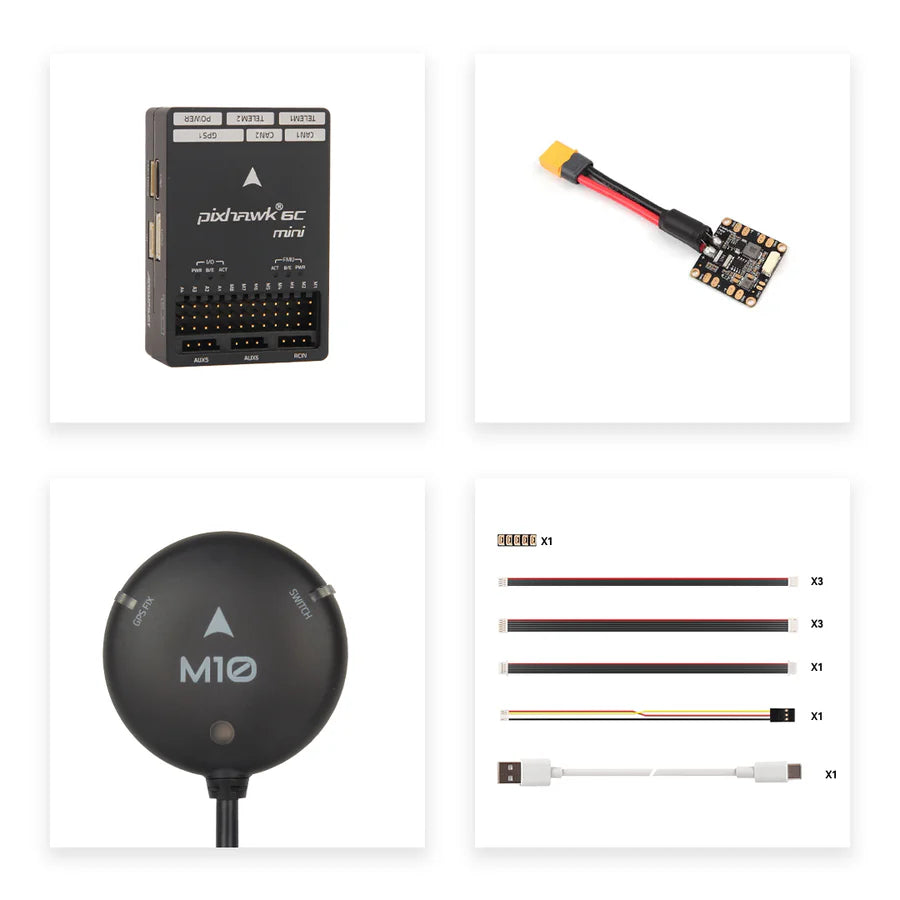
SKU20234 / 20235 / 20236 / 20237 / 20326 / 20327 / 20329 / 20330 zawiera:
-
Pixhawk 6C Mini (Model A / Model B)
-
Moduł zasilania PM02 V3 (12S) lub PM06 (14S)
-
GPS M9N lub M10
-
Zestaw kabli
Linki referencyjne:
-
Porty i układ pinów
-
Wymiary
-
Obsługiwane oprogramowanie firmware
-
Różnice między Pixhawk 6C a 6C Mini
-
Diagram systemowy & pinout
-
Tabela porównawcza modułów zasilania
Share