Pixhawk 6C
Pixhawk 6C
Nie udało się załadować dostępności odbioru osobistego
Pixhawk® 6C to najnowsza odsłona popularnej rodziny kontrolerów lotu Pixhawk®, oparta na otwartym standardzie Pixhawk® FMUv6C oraz standardzie złączy. Urządzenie ma fabrycznie zainstalowany system PX4 Autopilot®.
Wewnątrz Pixhawk® 6C znajduje się układ STMicroelectronics® STM32H743, połączony z nowoczesnymi sensorami firm Bosch® i InvenSense®, co zapewnia elastyczność i niezawodność w sterowaniu dowolnym pojazdem autonomicznym — zarówno w zastosowaniach naukowych, jak i komercyjnych.
Mikrokontroler H7 w Pixhawk® 6C posiada rdzeń Arm® Cortex®-M7 pracujący z częstotliwością do 480 MHz, wyposażony w 2 MB pamięci flash oraz 1 MB pamięci RAM. Dzięki zwiększonej mocy obliczeniowej, programiści mogą pracować wydajniej i wdrażać bardziej złożone algorytmy i modele.
Standard FMUv6C obejmuje wysokowydajne, niskoszumowe jednostki pomiaru inercyjnego (IMU) z redundancją, zaprojektowane z myślą o efektywności kosztowej. Wbudowany system izolacji drgań skutecznie filtruje wibracje o wysokiej częstotliwości i redukuje szumy, co przekłada się na dokładniejsze odczyty oraz lepsze osiągi lotu.
Pixhawk® 6C to idealne rozwiązanie dla programistów z korporacyjnych laboratoriów badawczych, startupów, środowisk akademickich (naukowców, profesorów, studentów), jak i zastosowań komercyjnych.
Główne cechy konstrukcyjne:
-
Wysokowydajny procesor H7 z taktowaniem do 480 MHz
-
Nowa, opłacalna konstrukcja o niskim profilu
-
Redundantne czujniki IMU firm Bosch® i InvenSense®
-
Nowo zaprojektowany, zintegrowany system izolacji drgań redukujący hałas i filtrujący wibracje o wysokiej częstotliwości
-
IMU są utrzymywane w optymalnej temperaturze pracy dzięki wbudowanym rezystorom grzewczym
-
Przełączalne sprzętowo tryby sygnału PWM 3.3V lub 5V (wymaga otwarcia obudowy)
Uwaga:
-
GPS M10 wymaga PX4 w wersji 1.14 lub ArduPilot 4.3 (lub nowszych)
-
Porównanie modułów zasilania znajduje się w tabeli porównawczej

Specyfikacja techniczna
Procesory i czujniki
-
Procesor FMU: STM32H743
32-bitowy Arm® Cortex®-M7, 480 MHz, 2 MB pamięci Flash, 1 MB SRAM -
Procesor IO: STM32F103
32-bitowy Arm® Cortex®-M3, 72 MHz, 64 KB SRAM
Wbudowane czujniki:
-
Akcelerometr/żyroskop: ICM-42688-P
-
Akcelerometr/żyroskop: BMI055
-
Magnetometr: IST8310
-
Barometr: MS5611
Parametry elektryczne
Zakresy napięcia:
-
Maksymalne napięcie wejściowe: 6 V
-
Zasilanie przez USB: 4,75–5,25 V
-
Zasilanie szyny serw (servo rail): 0–36 V
Limity prądowe:
-
Telem1 i GPS2 (łącznie): 1,5 A
-
Pozostałe porty (łącznie): 1,5 A
Temperatura pracy: -25°C do 85°C
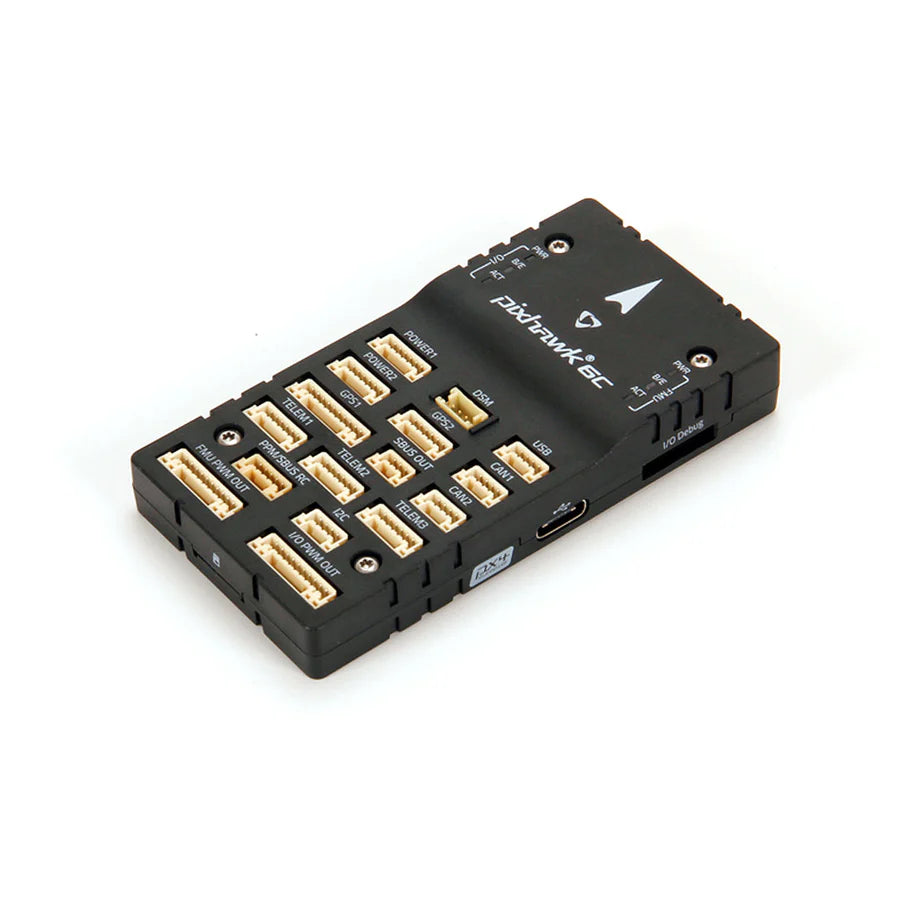
Wymiary i waga
-
Wymiary: 84,8 × 44 × 12,4 mm
-
Waga z obudową aluminiową: 59,3 g
-
Waga z obudową plastikową: 34,6 g
Szczegółowa dokumentacja techniczna dostępna jest na stronie:
https://docs.holybro.com
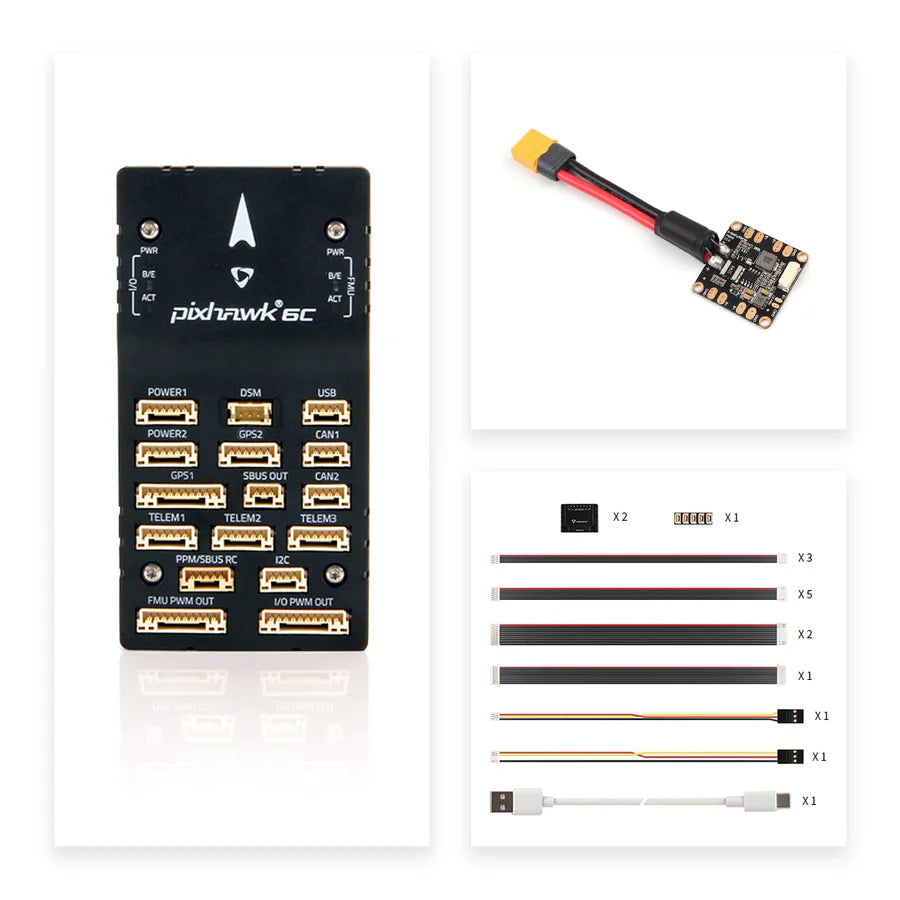
Zawartość zestawów
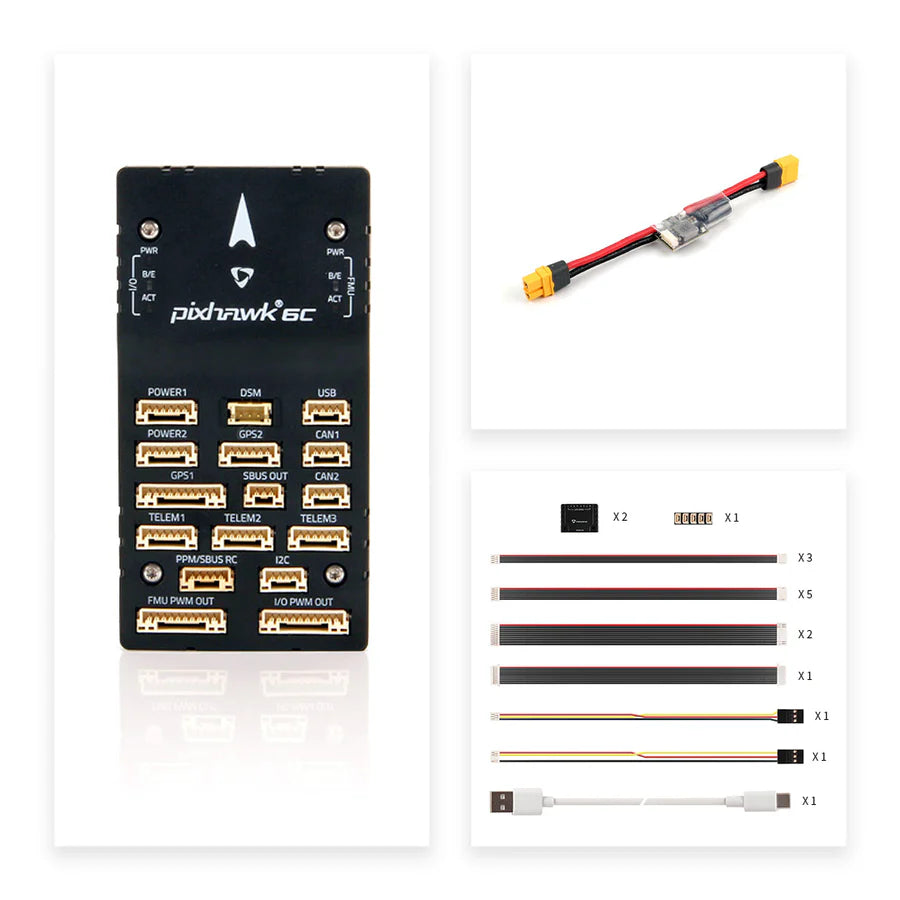
SKU 11054 / 11055
-
Kontroler lotu Pixhawk 6C (obudowa plastikowa lub aluminiowa)
-
Zestaw kabli
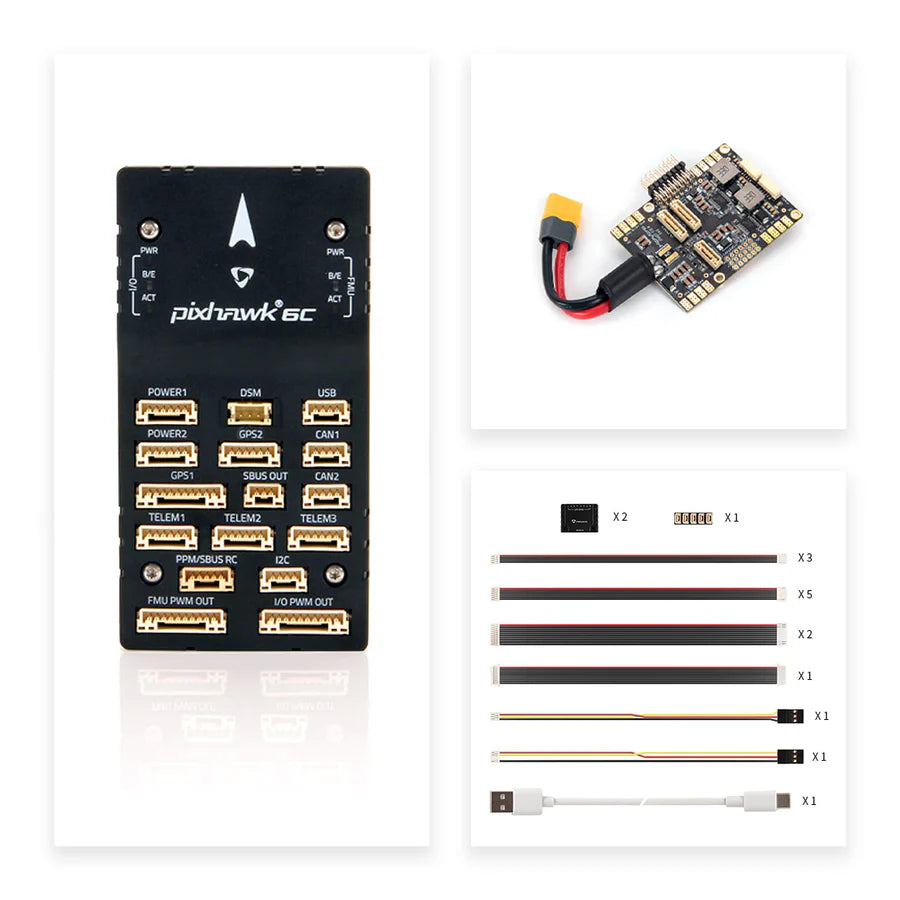
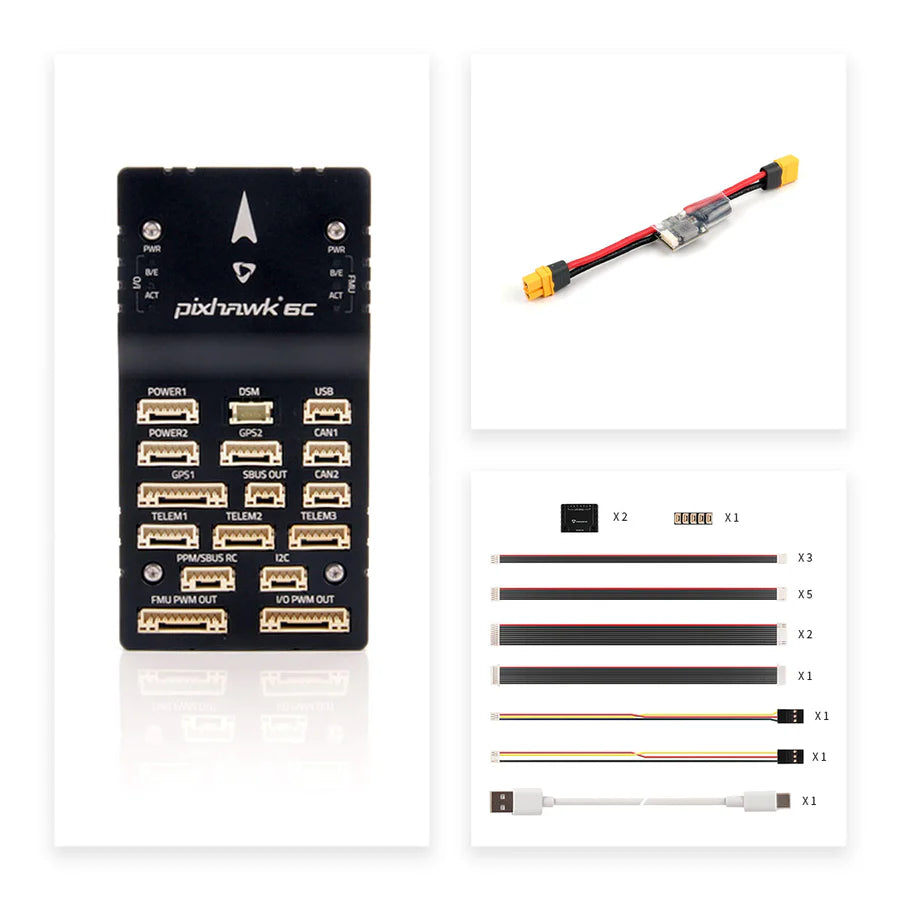
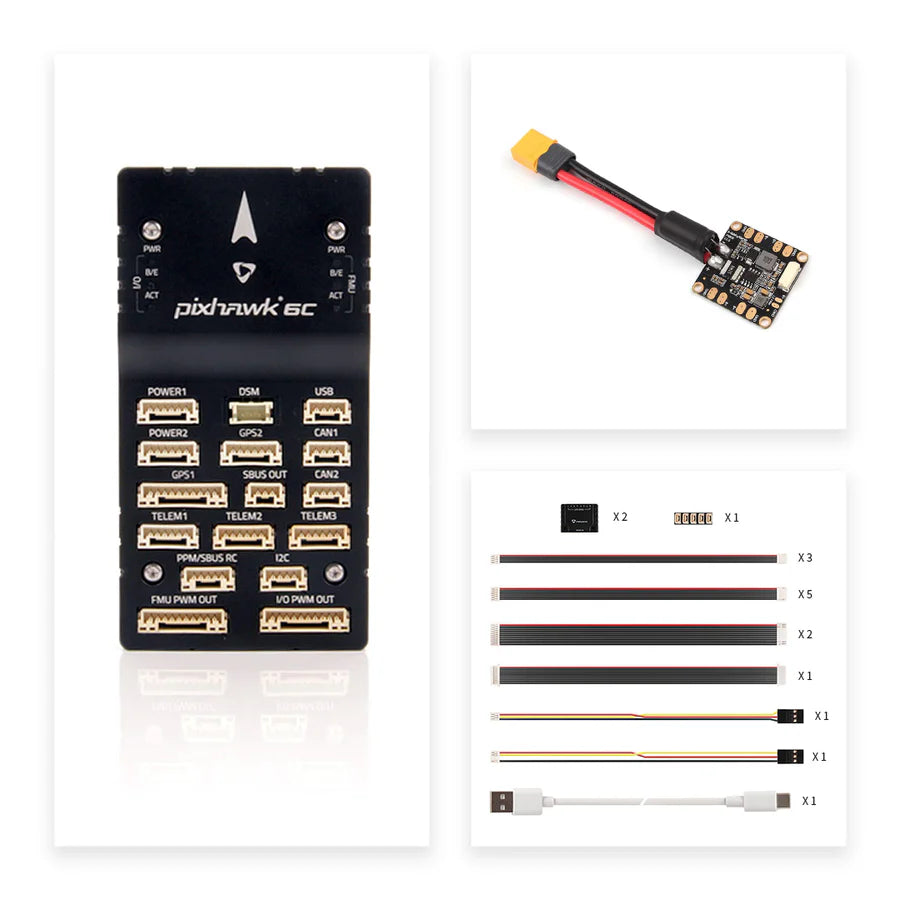
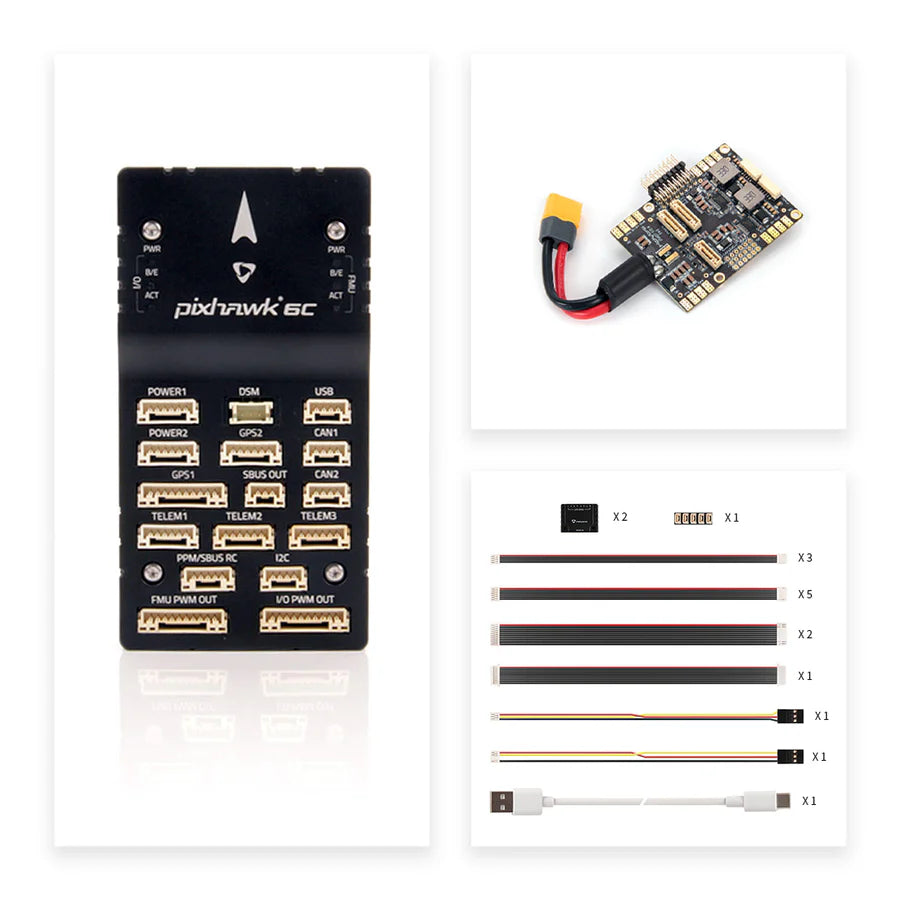
SKU 20179 / 20181 / 20183 / 20185 / 20246 / 20251
-
Kontroler lotu Pixhawk 6C
-
Moduł zasilania: PM02 V3 12S / PM06 14S / PM07 14S
-
Zestaw kabli
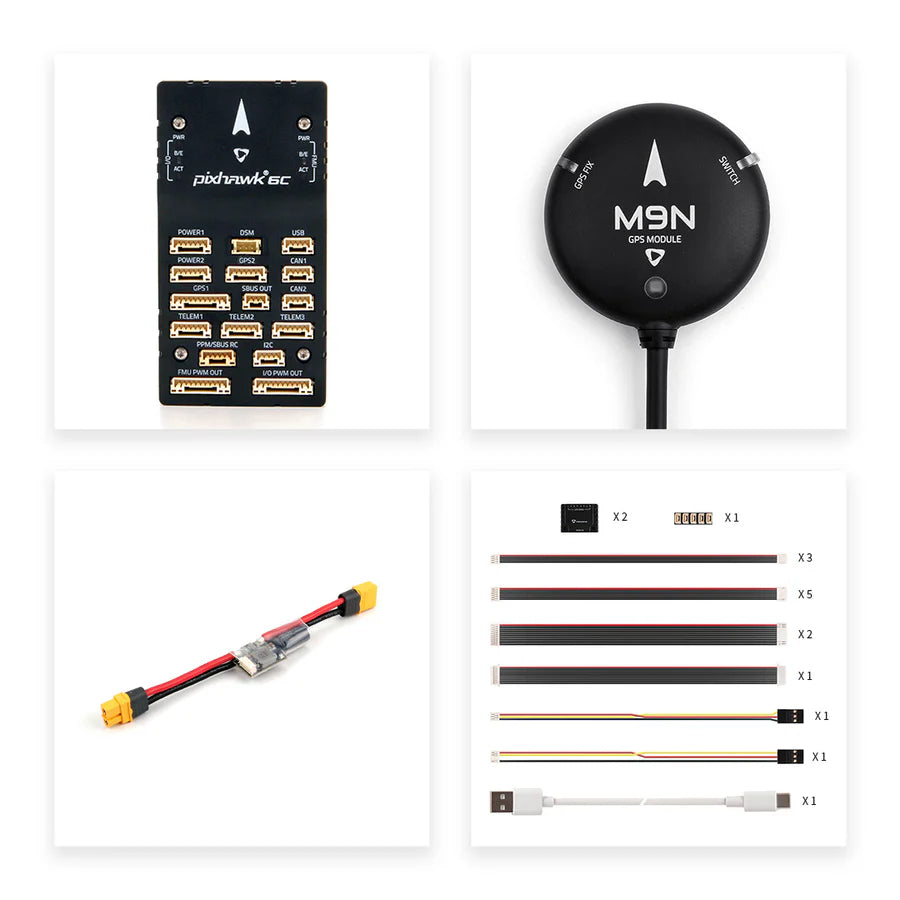
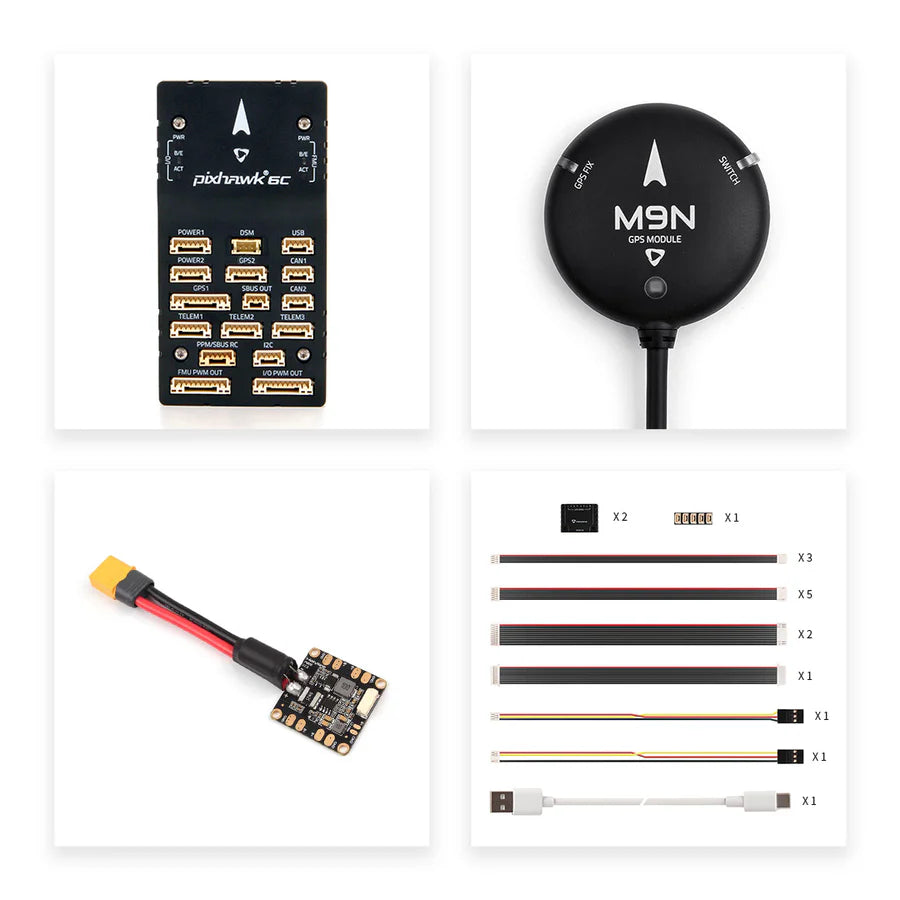
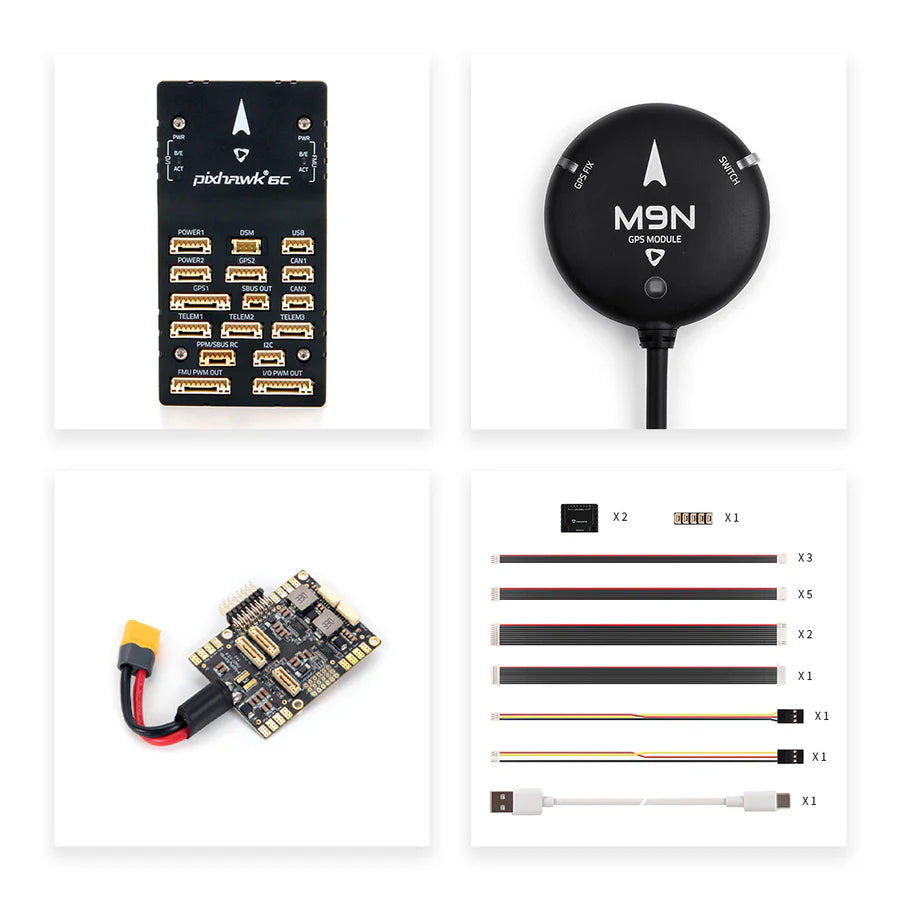
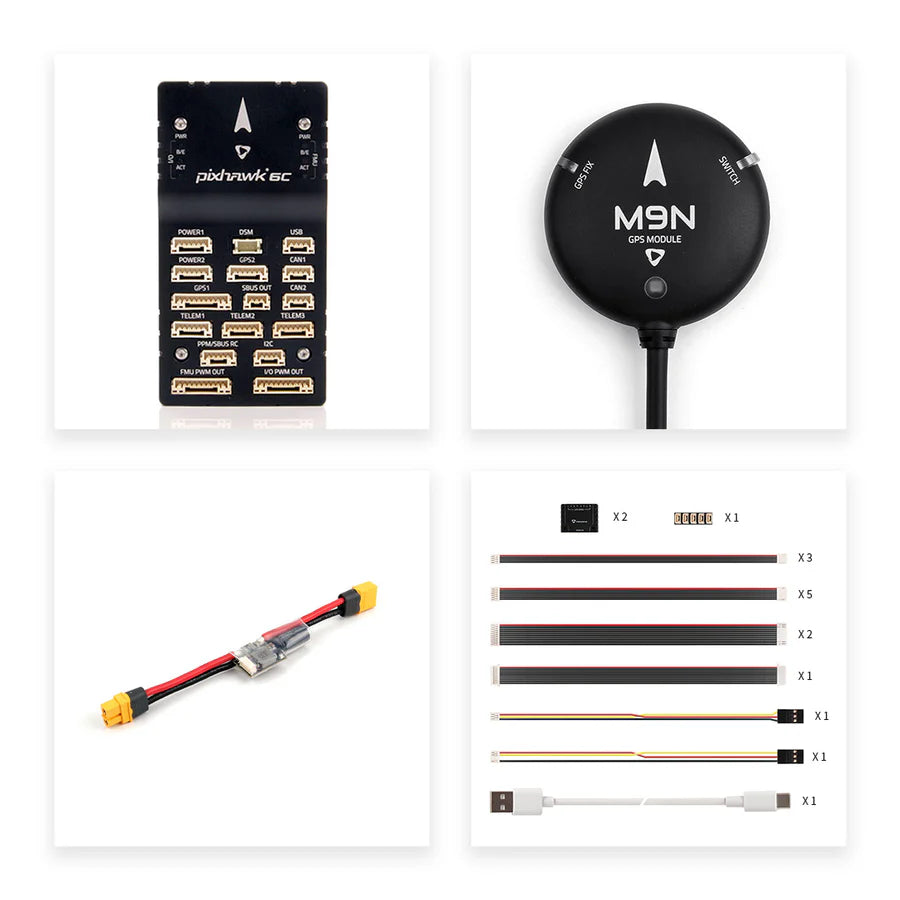
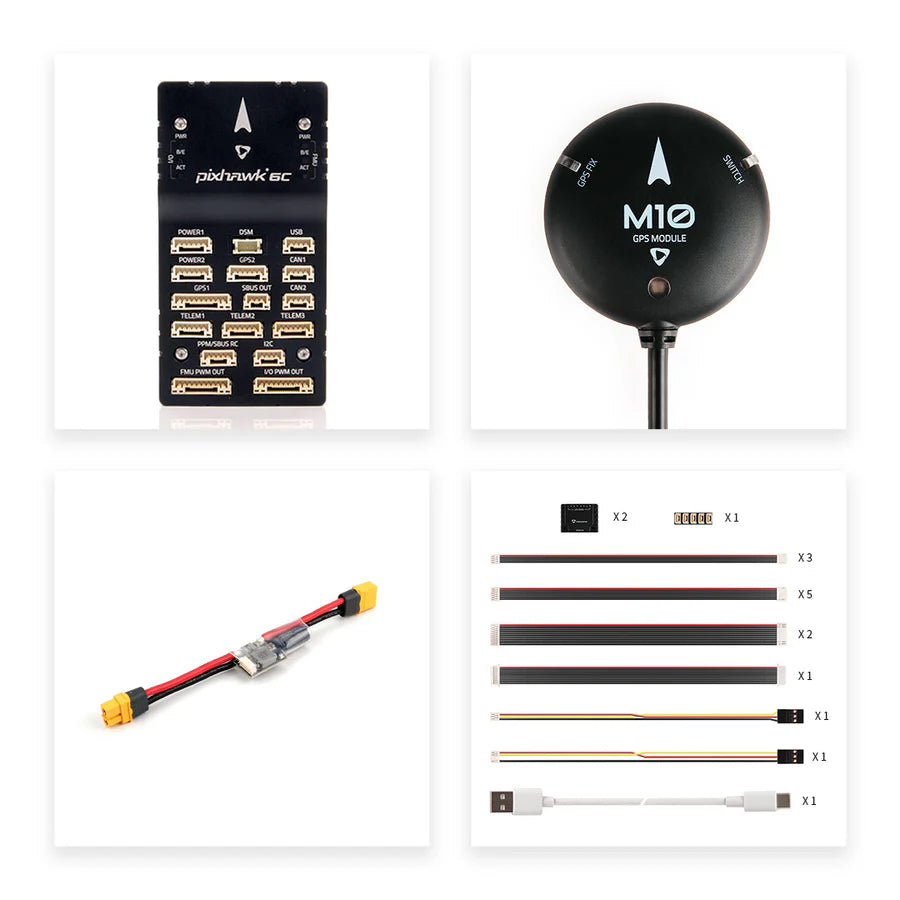
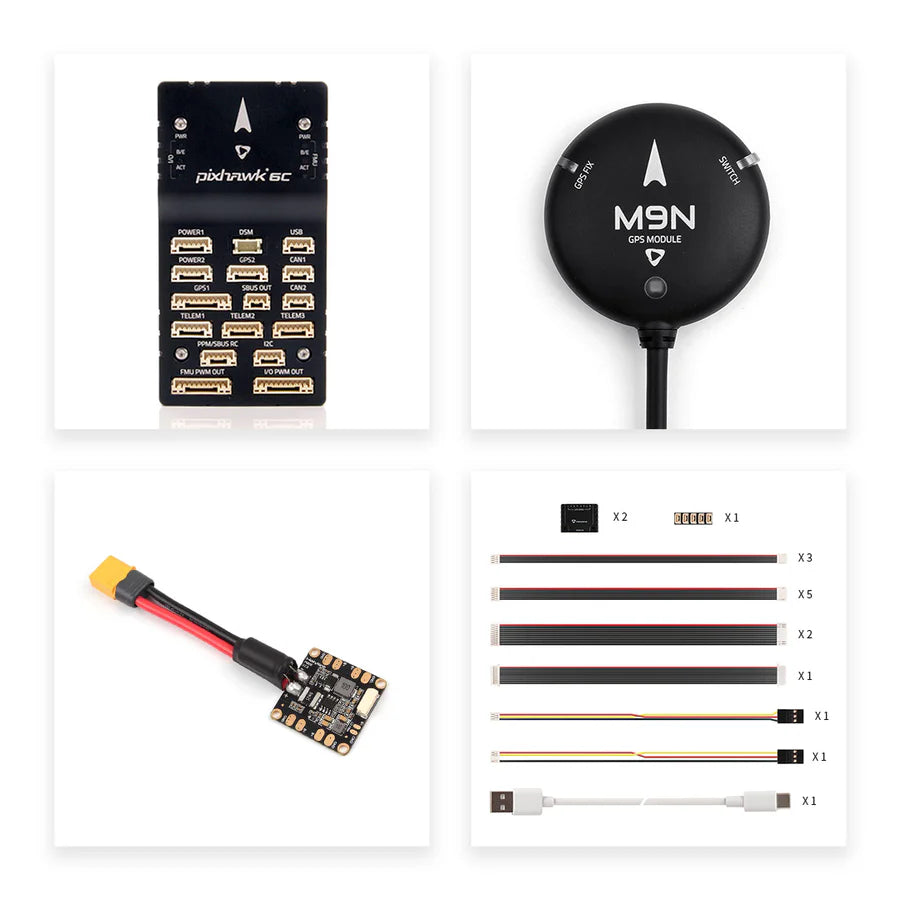
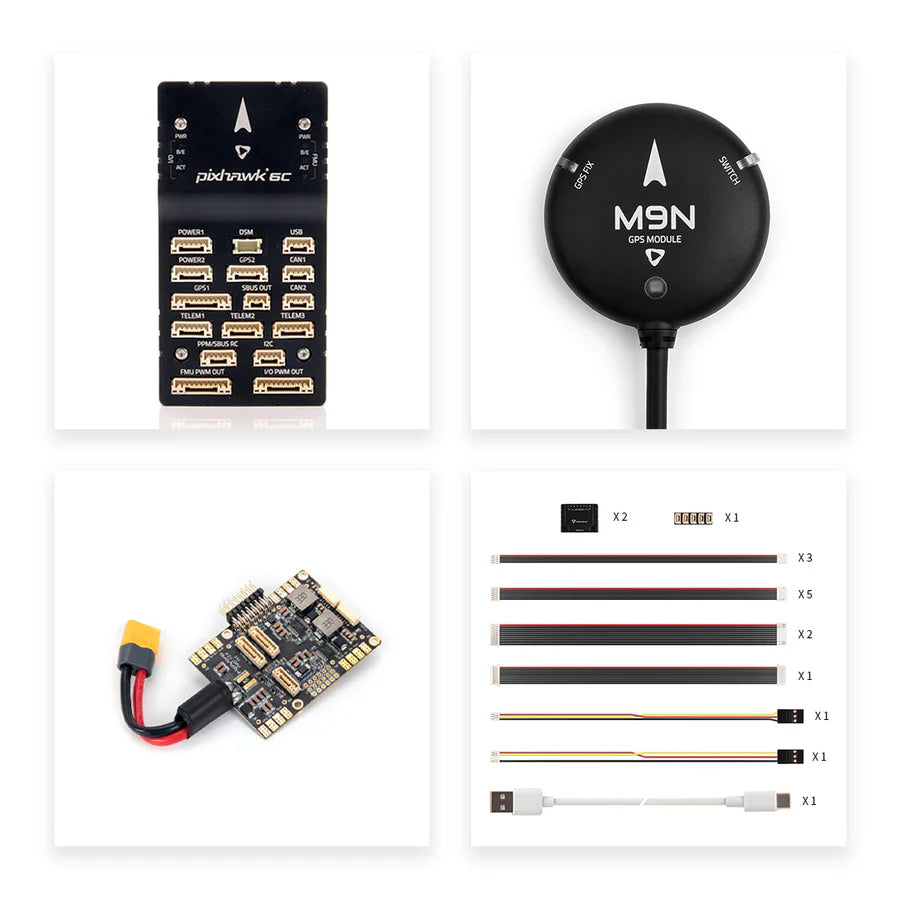
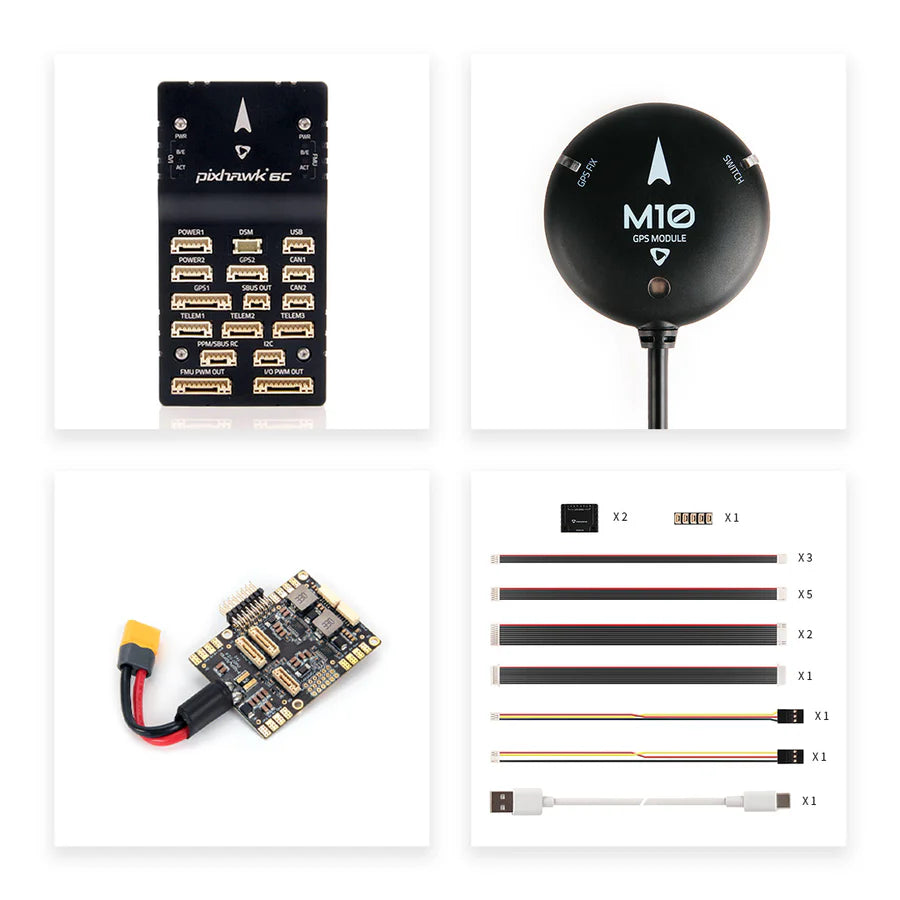
SKU 20230 / 20231 / 20232 / 20233 / 20247 / 20248 / 20249 / 20250 / 20252 / 20253 / 20254 / 20255
-
Kontroler lotu Pixhawk 6C
-
Moduł zasilania: PM02 V3 12S / PM06 14S / PM07 14S
-
GPS: M9N lub M10
-
Zestaw kabli